SCORP: Scene-Consistent Multi-Agent Diffusion Planning With Stable Online Reinforcement Post-Training for Cooperative Driving
Scene condition-enhanced diffusion pre-training with stable online RL post-training for safer, more efficient cooperative driving.
Abstract
Cooperative driving is inherently a safety- and efficiency-critical task that involves coordinating diverse, interaction-realistic multi-agent trajectories. Existing diffusion-based methods can capture multimodal behaviors from demonstrations, but they often suffer from weak scene consistency and poor alignment with closed-loop cooperative objectives. As a result, post-training becomes necessary, yet stable online post-training in reactive multi-agent environments remains challenging. In this paper, we present SCORP, a scene-consistent multi-agent diffusion planner with stable online reinforcement learning (RL) post-training for cooperative driving. For pre-training, we develop a scene-conditioned multi-agent denoising architecture that couples inter-agent self-attention with a dual-path conditioning mechanism: cross-attention provides direct scene-information injection, while AdaLN-Zero enables additional flexible and stable conditional modulation, thereby improving the scene consistency and road adherence of joint trajectories. For post-training, we formulate a two-layer Markov decision process (MDP) that explicitly couples the reverse denoising chain with policy--environment interaction, and we co-design dense, well-shaped planning rewards and variance-gated group-relative optimization (VG-GRPO) to mitigate advantage collapse and gradient instability during closed-loop training. Extensive experiments show that SCORP outperforms strong open-source baselines on WOMD, with 10.47\%--28.26\% and 1.70\%--7.22\% improvements in core safety and efficiency metrics, respectively. Moreover, relative to alternative post-training methods, SCORP delivers significant and consistent gains in driving safety and traffic efficiency, highlighting stable and sustained advances in closed-loop cooperative driving.
Method
Overall pipeline: condition-enhanced diffusion pre-training learns scene-consistent multimodal joint trajectories; stable online RL post-training aligns it with closed-loop safety and efficiency.
Pre-training: Multi-Agent Diffusion Model
Dual-path scene conditioning combines cross-attention and AdaLN-Zero for scene consistency in dense interactions.
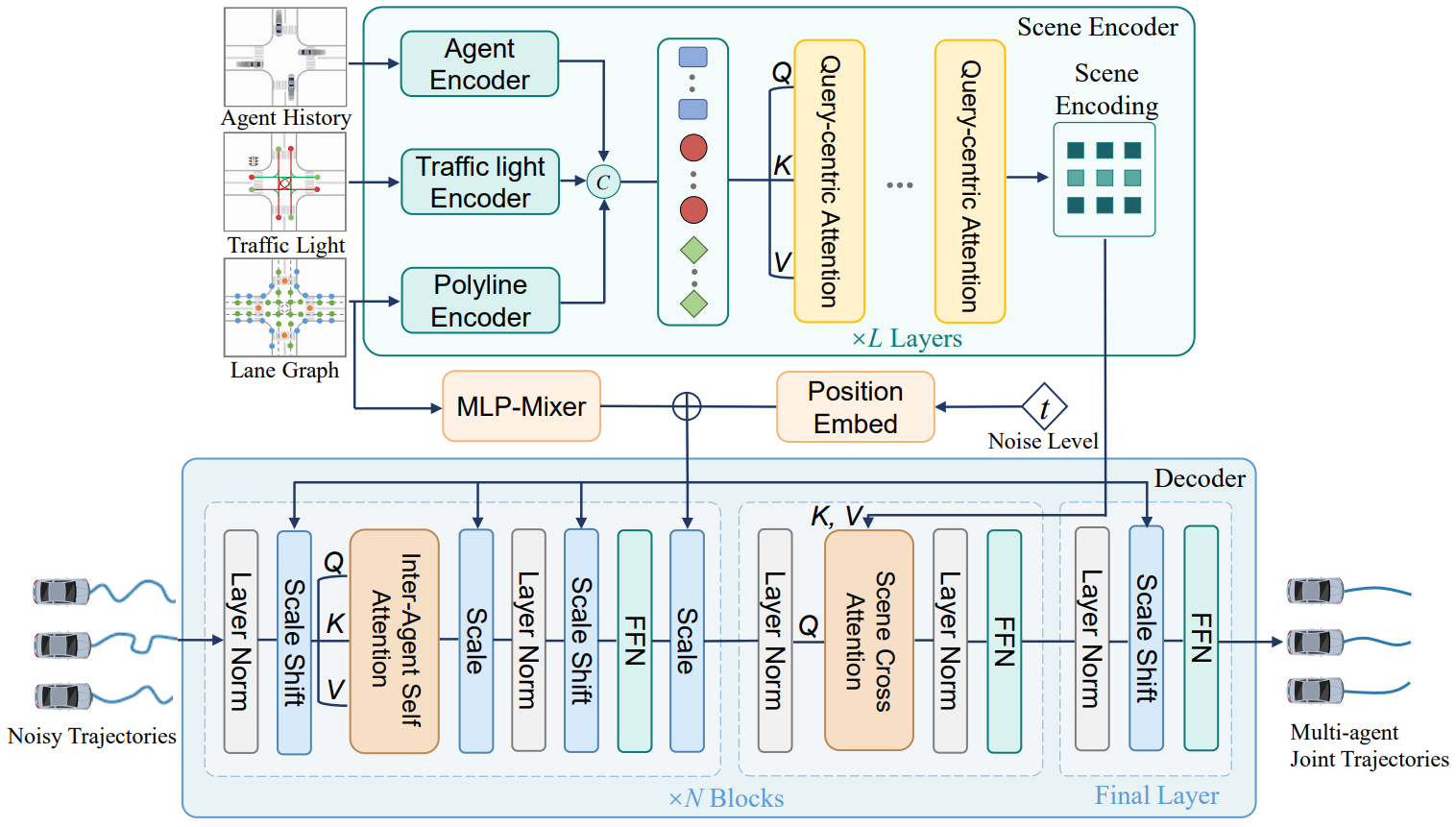
Architecture of the multi-agent diffusion planner. A scene encoder captures relational context in a symmetric manner, and a denoising decoder generates joint multi-agent plans via inter-agent attention and scene-conditioned generation, augmented by AdaLN-Zero for stable conditional modulation and constraint enforcement.
Post-training: Online RL with VG-GRPO
Dense rewards + VG-GRPO stabilize training and improve closed-loop safety-efficiency cooperation.
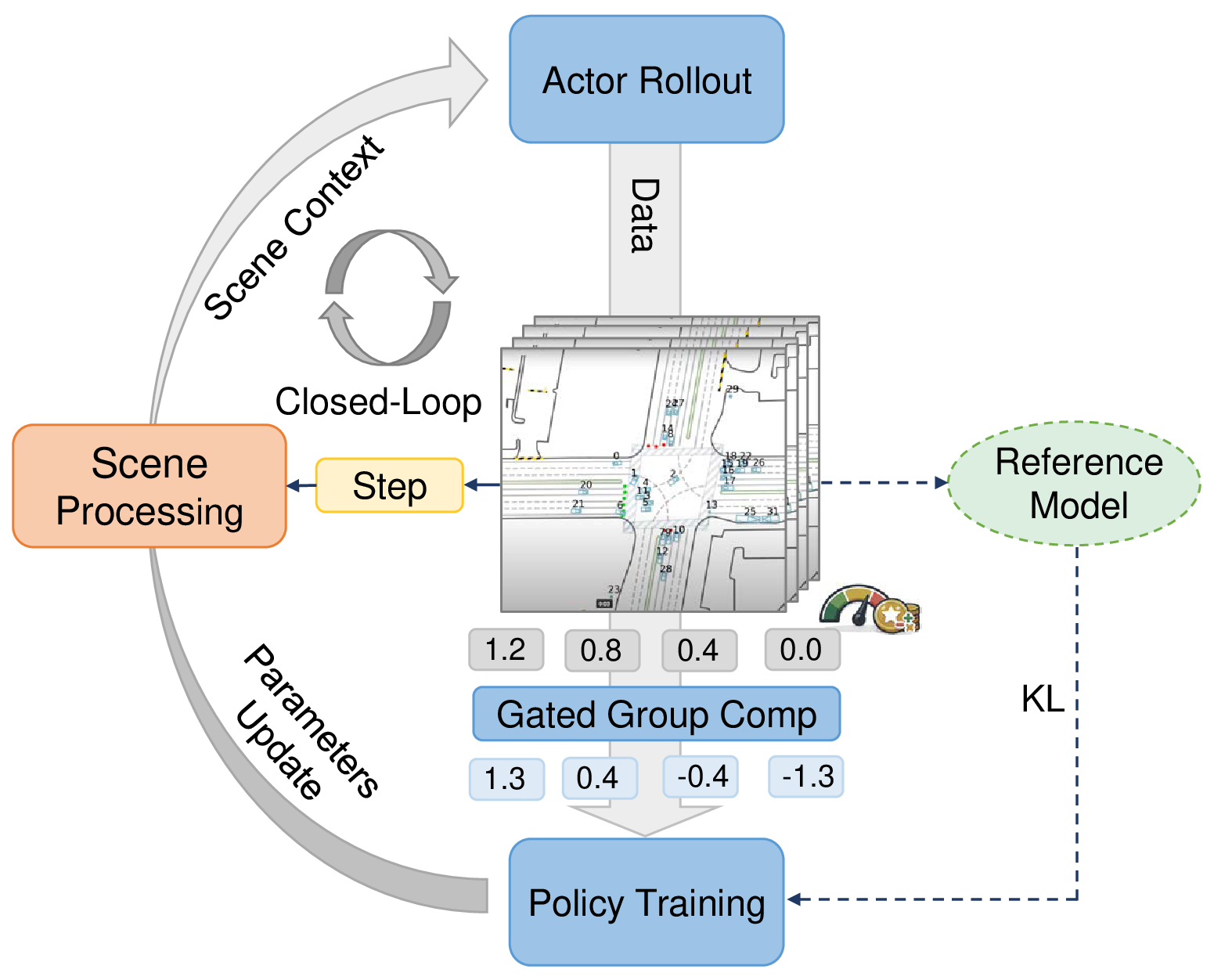
The stable online RL post-training framework has three core components: closed-loop policy rollouts, dense reward evaluation, and our proposed variance-gated group relative policy optimization (VG-GRPO).
Video Results
Local videos cover demonstrations, pre-training vs post-training comparisons, and ablations.
SCORP Showcase Reel
Comparison Group
Pre-training vs post-training. Pre-training can show undesirable behavior in some scenarios due to imitation-learning limits. Post-training substantially improves closed-loop planning, safety, and efficiency in challenging scenarios.
Ablation Group
AdaLN-Zero ablations with direct w/o vs with comparisons.
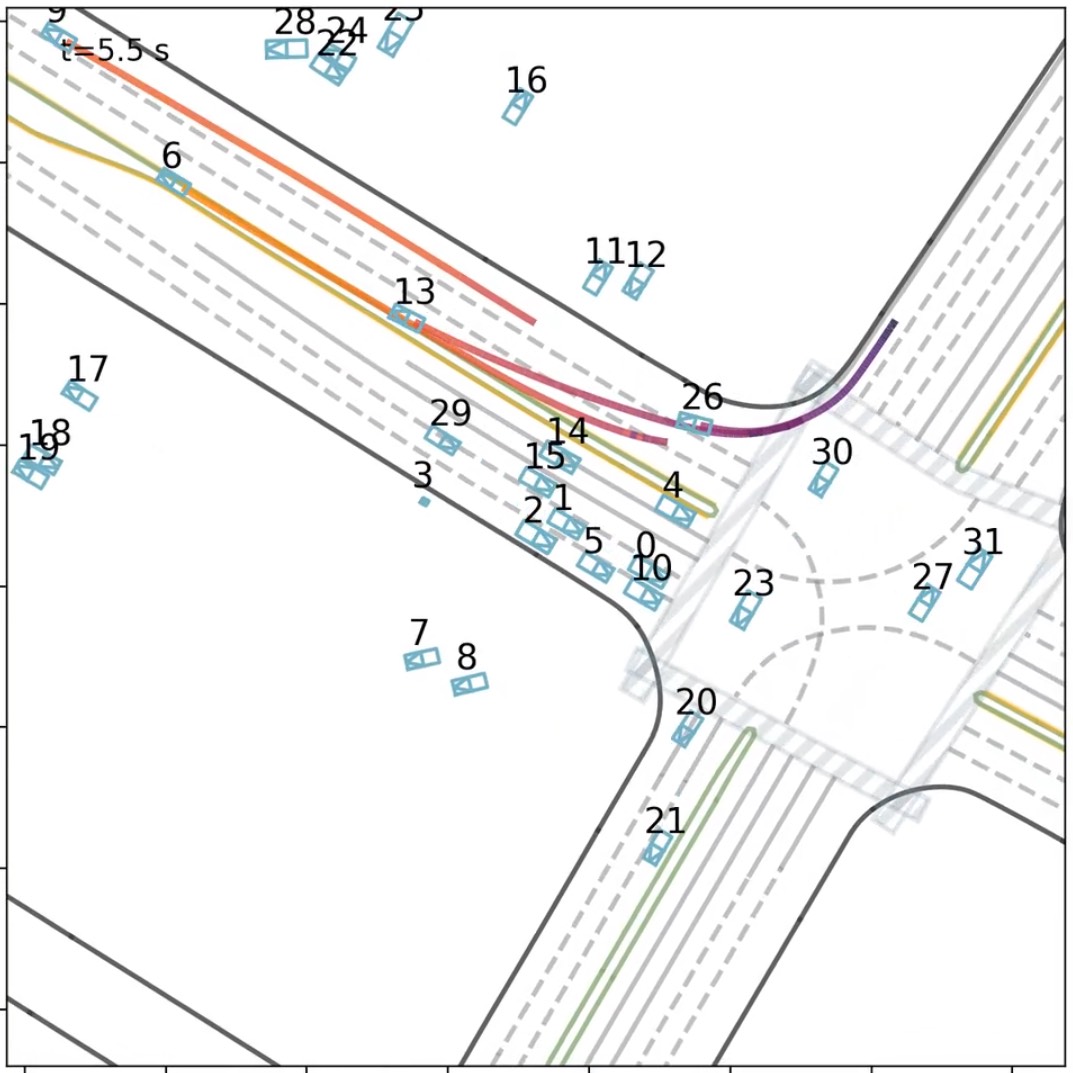
Visualization Group
Diverse cooperative behaviors under closed-loop execution.
Closed-loop Results
Primary objectives: collision rate (CR), off-road rate (OR), average speed (AS). Secondary diagnostics: ADE, Kin.
WOMD Testing Interactive Split
| Method | CR ↓ | OR ↓ | AS ↑ | ADE ↓ | Kin ↓ |
|---|---|---|---|---|---|
| TrafficBotsV1.5 | 2.74 ±0.21 | 1.79 ±0.14 | 8.03 ±0.48 | 1.68 ±0.09 | 0.26 ±0.02 |
| SMART-large | 2.22 ±0.09 | 1.58 ±0.10 | 8.34 ±0.30 | 1.30 ±0.01 | 0.21 ±0.01 |
| VBD | 2.46 ±0.14 | 1.92 ±0.18 | 8.08 ±0.52 | 1.41 ±0.02 | 0.24 ±0.01 |
| SMART-tiny-CLSFT | 2.10 ±0.10 | 1.53 ±0.12 | 8.47 ±0.44 | 1.23 ±0.03 | 0.25 ±0.02 |
| SCORP | 1.89 ±0.12 | 1.36 ±0.08 | 8.61 ±0.46 | 1.36 ±0.04 | 0.32 ±0.03 |
Values are mean ± std over repeated closed-loop evaluations in the same simulator configuration.
Effect of Post-training Strategy
| Method | CR ↓ | OR ↓ | AS ↑ | ADE ↓ | Kin ↓ |
|---|---|---|---|---|---|
| Pre-trained only | 2.04 ±0.11 | 1.68 ±0.10 | 8.36 ±0.42 | 1.28 ±0.02 | 0.25 ±0.02 |
| SFT | 2.01 ±0.07 | 1.64 ±0.06 | 8.37 ±0.36 | 1.15 ±0.015 | 0.25 ±0.01 |
| DPO | 1.97 ±0.13 | 1.58 ±0.09 | 8.15 ±0.39 | 1.33 ±0.04 | 0.27 ±0.01 |
| Offline RL | 2.18 ±0.09 | 1.82 ±0.14 | 8.98 ±0.68 | 1.37 ±0.05 | 0.26 ±0.02 |
| SCORP (Online RL) | 1.89 ±0.12 | 1.36 ±0.08 | 8.61 ±0.46 | 1.36 ±0.04 | 0.32 ±0.03 |
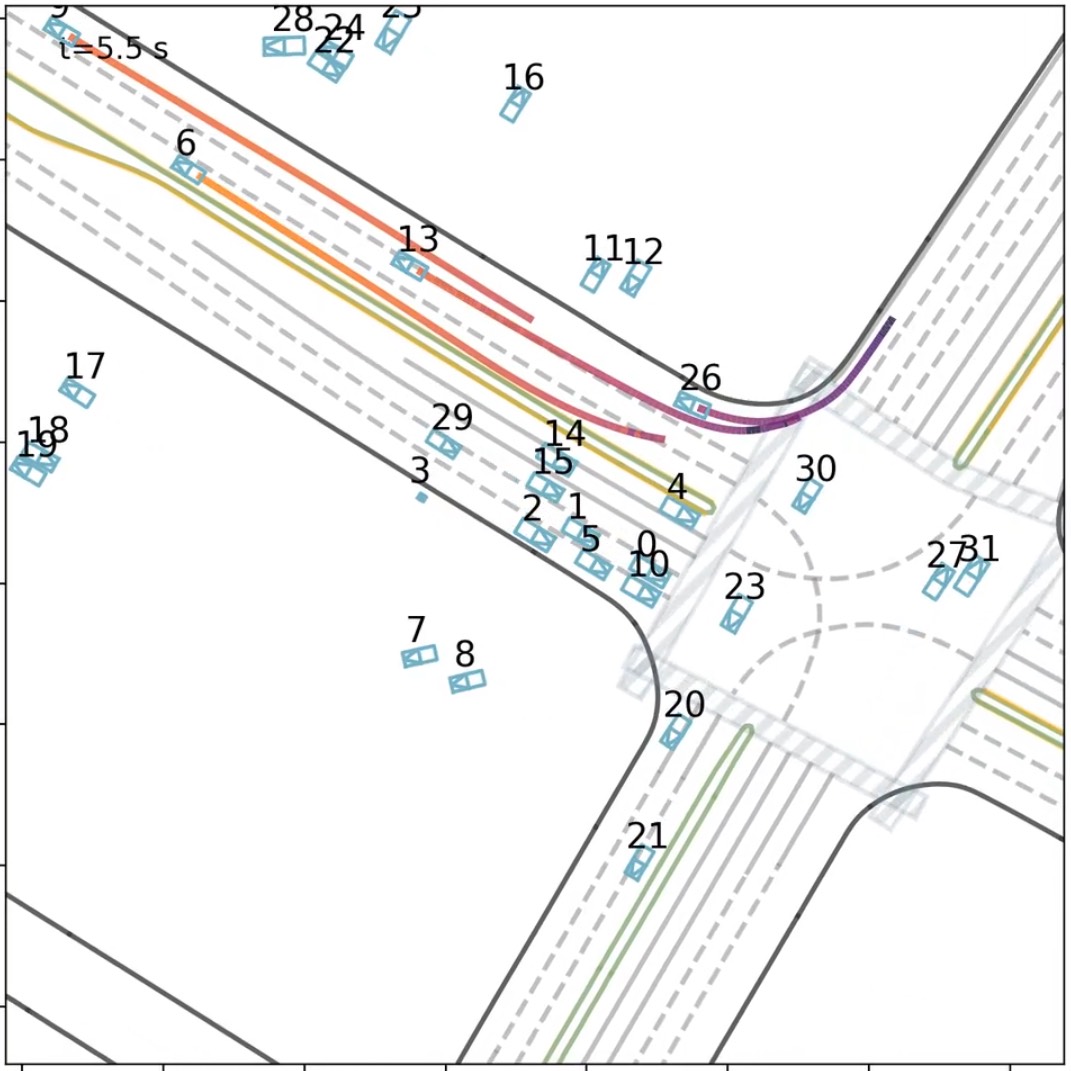
Qualitative: Pre-training vs. Post-training
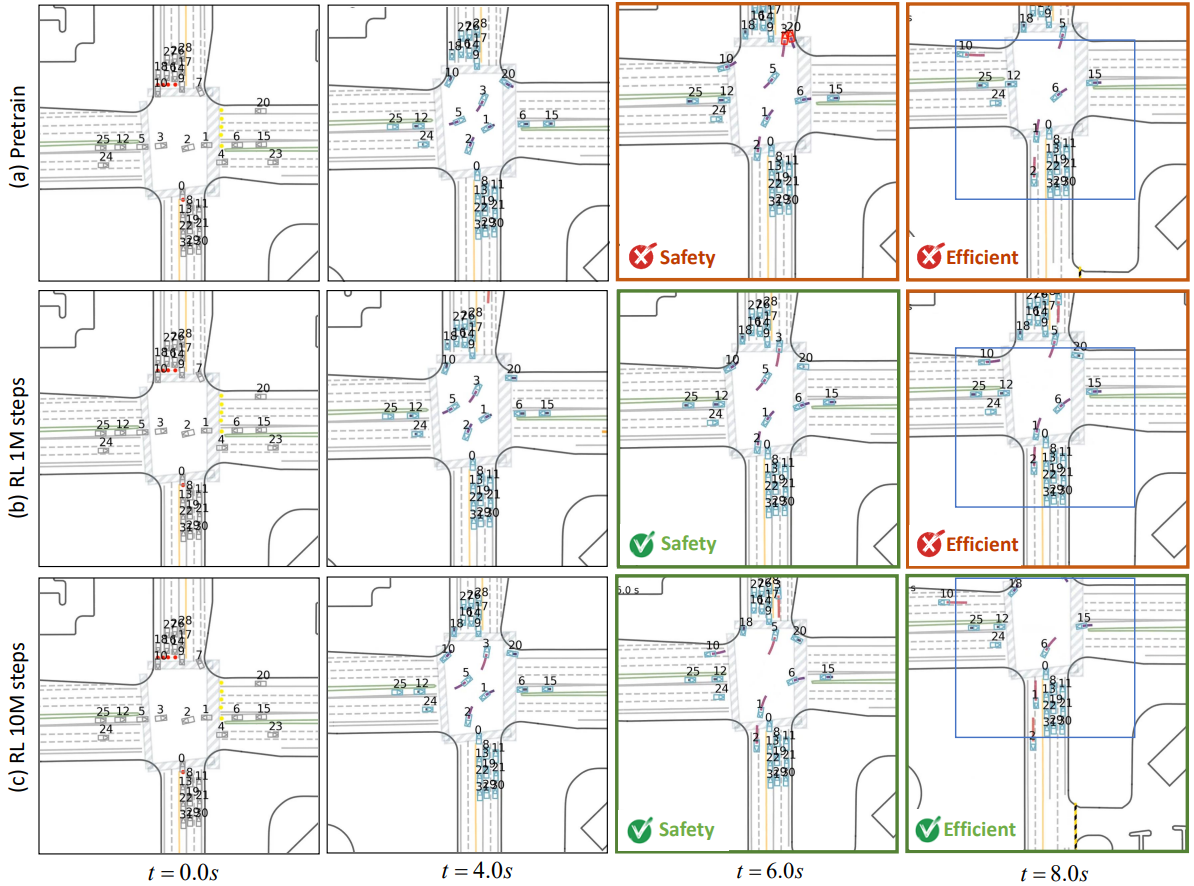
Example rollout: online post-training improves conflict resolution (safety) and overall traffic progress (efficiency) with longer training.
Stability: Road Consistency (AdaLN-Zero)
AdaLN-Zero scene-conditioned modulation improves boundary adherence in dense interactions, reducing off-road events.
Ablations
Compact summaries. Full details and protocols are in the paper PDF.
AdaLN-Zero
| Setting | CR ↓ | OR ↓ | AS ↑ | ADE ↓ | Kin ↓ |
|---|---|---|---|---|---|
| w/o AdaLN-Zero | 2.11 | 2.05 | 8.40 | 1.30 | 0.26 |
| with AdaLN-Zero | 2.04 | 1.68 | 8.36 | 1.28 | 0.25 |
VG-GRPO
| Gating std1/std2 | Collapse step | CR ↓ | OR ↓ | AS ↑ | ADE ↓ | Kin ↓ |
|---|---|---|---|---|---|---|
| w/o gating | ≈ 0.5M | 2.15 | 2.03 | 8.05 | 1.74 | 0.40 |
| 0.03/0.06 | - | 1.89 | 1.36 | 8.61 | 1.36 | 0.32 |
| 0.00/0.06 | ≈ 2.0M | 2.01 | 1.57 | 8.42 | 1.42 | 0.30 |
| 0.03/0.09 | - | 1.96 | 1.50 | 8.49 | 1.30 | 0.29 |
Ablation on Post-training Data Distribution
| Dataset Type | CR ↓ | OR ↓ | AS ↑ | ADE ↓ | Kin ↓ |
|---|---|---|---|---|---|
| High-score | 1.95 | 1.34 | 8.53 | 1.30 | 0.31 |
| Low-score | 2.18 | 1.99 | 8.49 | 1.40 | 0.37 |
| Full | 1.89 | 1.36 | 8.61 | 1.36 | 0.32 |
CR: collision rate (%); OR: off-road rate (%); AS: average speed (m/s); ADE: average displacement error (m); Kin: kinematic infeasibility rate (%).